
Heason Technology Ltd
Address:
Motion Solutions Centre
Spring Copse Business Park
Slinfold, West Sussex
RH13 0SZ
United Kingdom
Spring Copse Business Park
Slinfold, West Sussex
RH13 0SZ
United Kingdom
Phone: +44 (0) 1403 792 300
Heason Technology Ltd articles
Displaying 21 - 40 of 80
Heason Technology build EtherCAT controlled hexapod demonstration rig

Heason Technology demonstrates its capability for mechatronic design and build with an EtherCAT controlled 6-axis hexapod (parallel robot) demonstration rig that comprises mechanical, electronic and software components from several of its distribution partners. The rig actually uses two hexapods – a large servo-electric actuator driven unit that can run pre-programmed motion sequences or can be configured to mirror the movement of a smaller, manually controlled, ‘joystick’ with six linear position sensors. The motorised hexapod’s top plate is thus positioned to a full six degrees of freedom to move the load (three 20-inch TFT video monitors) in translation (x, y, z) and rotation (pitch, yaw, roll). For even more visual effect, the rig has an electric ducted fan and a Bernoulli-effect blower that supports a ball throughout the movement of the hexapod.
30th July 2015
New brushless torque motor features integrated servo drive with encoder feedback

The recently launched Megaflux MFH170i series brushless torque motors from Allied Motion Inc. are available from motion control systems integrator Heason Technology. The compact direct-drive solution for high-torque applications in robotics, scanning, tracking and other high precision motion systems comprises a powerful servo motor with an integrated digital servo drive and a high resolution optical encoder as a completely integrated package.
18th June 2015
New Gear Unit Range Brings Increased Performance

The recently announced new-generation TwinSpin G-series high-precision reduction gear unit from Spinea s.r.o. is available in the UK from Heason Technology. As the result of several years’ application experience and advances in manufacturing processes, the new gear reducer - with its integrated heavy-duty bearing system - offers significantly higher torque-to-weight ratio and greater tilting rigidity in addition to many other specification enhancements that will bring automation designers benefits such as smaller machine volumes, increased product quality, improved manufacturing precision and higher production throughput.
17th March 2015
Join us at tomorrow's Engineering Design Show - Stand D50
Heason Technology are set to showcase the best of breed motion solutions at this year's Engineering Design Show, starting tomorrow, at the Ricoh Arena in Coventry.
21st October 2014
Engineering Design Show 2014 - Show Preview

A comprehensive range of motion control components from world-class distribution partners and exceptional in-house motion system design and integration expertise is Heason Technology’s order of the day for this year’s Engineering Design Show 22nd - 23rd October 2014 Stand D50.
16th October 2014
Kollmorgen’s innovative single-cable interconnection system available from Heason Technology

As a Gold-Partner for Kollmorgen, Heason Technology offers the global motion control specialists high-performance servo drive systems with an innovative single cable option that combines motor power and feedback connection.
2nd August 2013
New Kollmorgen VLM servomotors bridge gap between stepper and induction motors

Now available from Heason Technology, Kollmorgen’s new VLM servomotor series to fill the gap between stepper and high-performance servo motors. The new VLM series synchronous servo motors offer OEMs, machine builders and end-users, an excellent price-performance proposition in the torque range of 0.5 to 4.5 Nm continuous and 16 Nm peak, with speeds of up to 6000 rpm.
10th June 2013
New slip ring assembly range expands motion system capability

Further extending its motion components and systems capability, HeasonTechnology has added a new range of precision slip ring assemblies and rotary joints to its extensive product portfolio. The range includes complete assemblies for rotary-to-stationary transmission of electrical signals, video signals, field buses etc. and power up to 50A and beyond.
18th April 2013
Kollmorgen AKD Servo BASIC available from Heason Technology

In many cases the BASIC AKD servo drives allow machine builders to forego the need for an external PLC with its associated wiring and interface programming. This allows them to save time, minimize space and reduce installation costs. In combination with the simple programming, using structured text and an integrated program editor with diagnostic functions, small applications can be realized very easily and quickly.
10th April 2013
Heason Technology goes Gold with Kollmorgen Europe
Heason Technology’s distribution partner status with Kollmorgen Europe has been elevated to the top ‘Gold-Partner’ level following a record year in 2012. The Gold-Partner status - the first to be awarded outside Germany or Switzerland - consolidates the UK-wide preferred partner agreement between the two companies.
18th March 2013
Heason Technology supply custom motion system for CT scanner sample manipulator at the Imperial College QCCSRC Imaging Laboratory

Heason Technology has completed the integration of a vertical positioning system for a CT scanner used for geological studies at the Department of Chemical Engineering at Imperial College London. The CT scanner is the centrepiece of the new Qatar Carbonates and Carbon Storage Research Centre - a $70 million, 10 year programme in conjunction with sponsors Qatar Petroleum, Shell and the Qatar Science and Technology Park to improve the understanding and development of the storage of CO2 in carbonate reservoirs to help mitigate climate change.
20th February 2013
Gold DC Bell for Stepper Motors

High power density Gold servo drive for Stepper Motors – delivers up to 1.2 kW of continuous power in a compact package. The Gold DC Bell is a high power density servo drive that provides top servo performance, advanced networking and built-in safety.
14th February 2013
Electrical Rotating Joint / Slip Rings
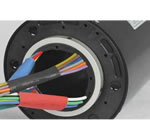
Heason Technology expand product portfolio to include range of standard and application specific custom slip rings. Slip Rings can be used in any system requiring the transmission of electrical and/or power signals to an intermittently or continuous rotating shaft.
31st January 2013
Kollmorgen Cartridge DDR; the Direct Drive Rotary Torque Motor

Introduced as a completely new category for Kollmorgen's range of direct drive torque motors, the CARTRIDGE DDR motor is now fully available from Heason Technology. The innovative and very compact design includes a hollow shaft rotor, a stator and high resolution feedback device, all pre-aligned in a bearing-less assembly and enclosed in a durable housing complete with power and feedback connectors.
28th November 2012
High Precision AirGlide Air Bearing Positioning System

Heason Technology's has launched the new AirGlide Ultra Precise Air Bearing System. With positional accuracy to within 3 microns for the standard version and better than 1 micron for the interferometer calibrated version, the AirGlide has a bidirectional repeatability of +/- 0.3 microns over a travel range of up to 1000 mm.
2nd November 2012
Heason's range of slit packages for the ISIS LARMOR beamline instrument demonstrates capability for custom motion system design and build

Heason Technology has designed and manufactured a range of application customised and completely non-magnetic four axis precision “slit” packages for use on the LARMOR instrument at the STFC's ISIS neutron and muon beamline facility in Oxfordshire. LARMOR is presently under construction and due for completion in 2014.
25th September 2012
Low cost motorised positioning range will suit research and industrial applications

Heason Technology has released a new range of economically priced stepper motor driven miniature positioning stages for low-cost applications in laboratory and research as well as automated alignment for production and test. The comprehensive and modular range, from Heason Technology's distribution partner GMT Global, suits medium precision use and includes linear, rotary, goniometer, and vertical elevation stages together with DSP controlled high performance microstepping drives.
22nd August 2012
Miniature goniometer stage completes ceramic motor driven micropositioning range

Complementing and completing Nanomotion's range of ceramic motor driven miniature positioning stages, the new FBG series goniometer is available in four stack sizes that combine to provide a common pivoting point for a two-axis tip/tilt angular motion set-up with a positioning resolution as low as 1 arc second. Available from Heason Technology, the low profile stages provide pivot axis radii of 71, 96, 102 and 137 mm.
10th May 2012
Heason 's latest miniature rotary motor has all the advantages of Nanomotion's ceramic motor technology

Heason Technology has launched a new 15 mm diameter miniature precision rotary servo motor from Nanomotion as a direct-drive solution that features the unique operating characteristics of the ceramic motor specialists technology - providing inherent braking and the ability to eliminate servo dither when in a static position – even under power-off conditions.
26th April 2012
New low cost linear actuator range is adaptable and flexible

Heason Technology's new H series linear actuators are aimed at OEM positioning applications in automated manufacturing and test equipment where competitive cost vs. performance and maximum flexibility is required.
21st December 2011
Product Centre Updates






2024 World Battery & Energy Storage Industry Expo (WBE)
8th August 2024
China 1st and 2nd Floor, Area A, China Import and Export Fair Complex