
Simulation and Compensation of Motion: Hexapods for Dynamic Applications

Small motion often has a great effect. Just a light shaking of the hand results in blurred, "fuzzy" photographs; unwanted motion due to guiding errors, machining processes etc. can interfere with precision machines during production to such an extent that the result becomes unusable. The constantly increasing requirements on quality and performance of the product make it necessary to avoid these types of problems. The simulation of motion and its compensation are therefore important tools. For this reason, dynamic Hexapods play an important role in positioning systems.
When demand on production and quality assurance at component level or the end product increases, it makes sense in many areas to simulate motion. Typical examples of this are acceleration or gyroscopic sensors such as those used in smartphones, cell phones and cameras for detecting changes in position. They are tested by means of a specified motion pattern. Similarly, this applies to the algorithms and mechanical systems of image stabilization systems in cameras that have to be tested for effectiveness.
Simulation of Defined Motion
Obtaining sharp images without using a tripod and at the same time, compensate for natural and artificial motion is currently one of the decisive factors for cameras. Acceleration sensors measure linear and gyroscopic sensors measure angular acceleration. In cameras for example, they detect the involuntary shaking motion of the photographer or the vibration of a vehicle or airplane so that image stabilization systems can compensate automatically. Simulation of defined motion or vibration allows these measures to be tested. The CIPA (Camera and Imaging Product Association), an international alliance of camera manufacturers similar to an ISO committee, develops the technical standards and the DC-011-2015 is the new standard defining the test conditions for motion simulation (Image 1). There are also similar simulation tasks in medical technology. One example is the simulation of eye motion.
Compensation of Defined Motion
In order to meet increasing quality requirements in other areas, it is necessary to focus on compensation of defined motion and not the simulation. This includes for example, guiding errors in processing machines (wobble, eccentricity) or compensation of defined but unwanted proper motion during the production process itself. Without this type of compensation, production tolerances can go out of control and in the worst case, faulty products could be produced. In this context, even compensation of random motion can become an issue. Motion and jolts caused by footfall, fans, cooling systems, motors, machining processes etc., can for example, falsify the pattern during micromachining to such an extent that the result becomes unusable. Vibration isolation is the answer to this. For this purpose, any vibration is recorded so that the required countermotion can be generated for compensation.
What must Motion Simulators and Compensators be Capable of?
The requirements on systems for motion simulation and compensation are high: Simulation for test purposes requires natural and artificial motion to be precise, repeatable, and simulated with the same dynamics and accuracy on all linear and rotatory axes. Therefore, this involves running high-precision trajectories with the corresponding dynamics for compensating defined motion or motion errors. Alternatively, it is also possible to record the motion in the direction of the respective axis and immediately initiate the countermotion.
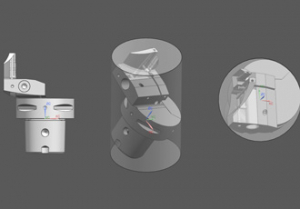
In every case, multi-axis, dynamic positioning systems are necessary that operate with micrometer or even nanometer accuracy. Thanks to their parallel kinematic design (Image 2), there are a number of reasons why Hexapods are one step ahead. Their advantages compared with serial or stacked systems, are that they have much better path accuracy, repeatability and flatness. In addition, the moved mass is lower, enabling better dynamic performance, which is the same for all motion axes. Moreover, cable management is no longer an issue, because cables are not moved, and, last but not least, the system features a much more compact design. The product range of PI (Physik Instrumente, compare text box) includes a large number of Hexapods in various different versions that are suitable for different loads, are offered with different types of drives and designed for all
kinds of ambient conditions. It is therefore possible to offer customized solutions even for sophisticated motion simulation and compensation systems.
Highly Dynamic and CIPA-certified
Various different drive types are possible for high dynamic simulation of predefined motion. Hexapods with electromagnetic, brushless torque motors and the appropriate mechanical design of the drivetrain and sensor technology for example, already achieve velocities up to 25 mm/s and accelerations of up to 2 g. The Mini-Hexapod H-811 (Image 3) is perfectly designed for the requirements of testing image stabilization systems and is already certified by the CIPA. It is able to simulate vibration, e. g., rotary motion, with dynamics of 20 Hz and travel of 0.1°. For this purpose, the Hexapod system performs a repeatable and defined test trajectory. It provides travel ranges up to 34 mm on the XY plane and up to 13 mm in the Z direction. The tilt angles are 20° around the X and Y axes and up to 42° around the vertical.
The best dynamic performance is reached by Hexapods with magnetic PIMag® direct drives; currently, velocities of several hundred mm/s and accelerations up to 4 g are possible. The special design with flexure joints completely dispenses with rolling or frictional elements and therefore allows zero-backlash motion without mechanical noise, which means that undesired frequency interference from the mechanical system of the Hexapod does not influence the measurement. Automatic test cycles during motion simulation with high frequencies can be realized with high acceleration and velocity. At the same time, precise following of specified trajectories is possible.
The H-860KMAG (Image 4) is a Hexapod in this class. Due to the lightweight design of this concept consisting of extremely stiff carbon fiber parts with low moving masses, it is possible to achieve particularly fast and precise motion as well as high acceleration. Thanks to its parallel-kinematic design for six degrees of freedom of motion, the 6-axis system offers precise tracking of predefined trajectories, sinusoidal curves and freely definable paths with high accuracy. This also includes a powerful digital controller with open software architecture and Hexapod-specific software. Typical areas of application for these highly dynamic Hexapods also include testing of image stabilization algorithms according to the CIPA standard. Moreover, they are predestined for simulating oscillations. For example, they can be used in the medical field for simulating eye motion, eye tracking, and any other human or artificial motion. In this context, the keywords are ophthalmology (strabismus) or prosthetics.
Hexapods Compensate Motion Errors
Piezo-based Hexapod systems are a good choice (Image 5) when the focus is on compensation of defined motion with nanometer accuracy. Resonant frequencies of 1 kHz enable fast position control with repeatability in a range of 1 nm. The space-saving, parallel-kinematic design allows low overall heights. This means that the Hexapod can be integrated into machines where it is intended to compensate their guiding errors or proper motion. The piezo drives are wear-free and also operate under strong magnetic fields or in a high vacuum.
As is the case with other Hexapod systems, operation is performed by high-performance digital controllers that allow easy commanding, thanks to user-friendly software (Image 6). The positions are specified in Cartesian coordinates; all transformations to the six individual drives are performed inside the controller. The freely definable rotary or pivot points are an essential feature. This makes it possible to match the motion of the Hexapod platform directly to the respective application and integrate it into the overall process. Therefore, the dynamic and highly accurate Hexapod systems are indispensable aids for simulating and compensating defined motion.
Similar articles

ed.jpg)

More from Physik Instrumente (PI) GmbH & Co. KG
- Individual service for high-end positioning systems 6th February 2018
- Catalogue for alignment of optics and SiP 30th January 2018
- Compact linear stage driven by three-phase linear motor 5th January 2018
- Don't let the shakes ruin your selfie 13th November 2017






Write a comment
No comments